|
รายละเอียดสินค้า:
|
| Working Voltage: | DC12-24V | Working current: | 2A |
|---|---|---|---|
| Speed control: | PWM or 0-5V | Speed pulse signal output: | Yes |
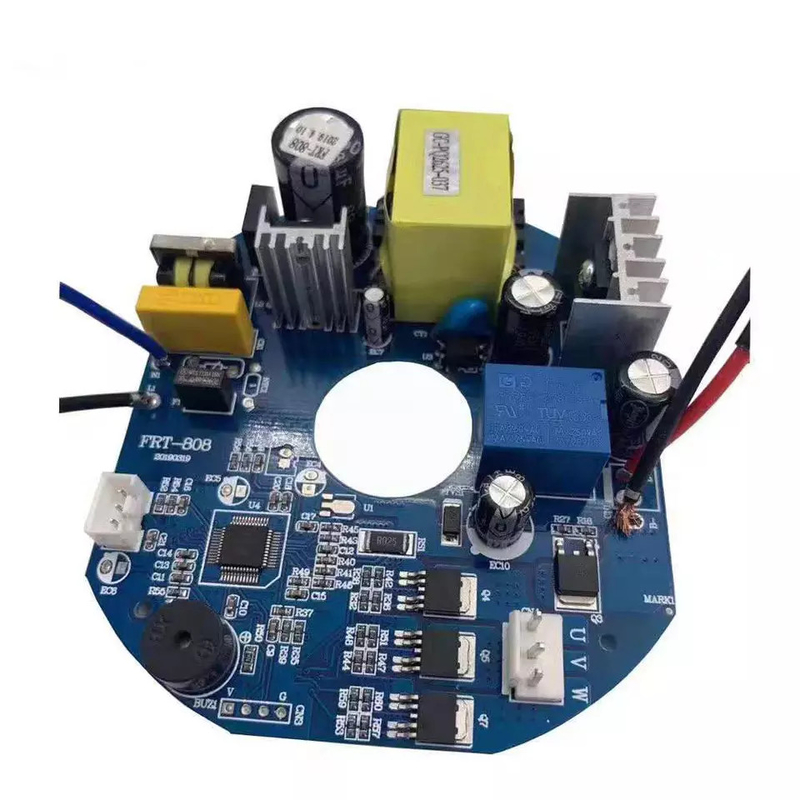
| Color: | Green | Model number: | JYQD-V6.7 |
| แสงสูง: | ไดรเวอร์มอเตอร์ PWM BLDC,ไดรเวอร์มอเตอร์ไร้แปรงถ่าน 2A,มอเตอร์ไร้เซ็นเซอร์ไร้แปรง 24V ไดรเวอร์ |
||
1. กรุณายืนยันว่าปริมาตรแรงดันและพลังงานของมอเตอร์ไม่เกินระยะของพานขับตามที่กําหนด
2บอร์ดขับเคลื่อนมอเตอร์ BLDC นี้ถูกใช้สําหรับมอเตอร์ brushless sensorless 3 ขั้นตอน แต่ไม่เหมาะสําหรับมอเตอร์ brushless sensorless 3 ขั้นตอนโดยตรงถ้าผลขับรถไม่ดี (เช่นการเริ่มต้น jitter, ย้อนกลับ, ปัจจุบันการทํางานของมอเตอร์ไม่มีภาระใหญ่เกินไป, ความเร็วไม่มั่นคง, ประสิทธิภาพต่ํา, และไม่สามารถเริ่มต้นกับภาระ) ลูกค้าสามารถปรับความต้านทานและความจุของบอร์ดขับรถตามสถานการณ์จริง เพื่อให้เกิดผลการขับรถที่ดีที่สุด (ดูข้อแนบเพื่อวิธีการปรับ)
3. JYQD-V6.7 BLDC โมเตอร์ไดรฟ์บอร์ดเป็นบอร์ดเปล่าโดยไม่มีบ้านและ heatsink หากพลังงานของมอเตอร์ต่ํากว่า 36Wมันเพียงแค่จําเป็นต้องให้แน่ใจว่าอากาศปกติและดีการปิด.
ผู้ติดต่อ: Ms. Lisa
โทร: +86-18538222869